Un equipo de estudiantes del Instituto Tecnológico de Celaya (Itcelaya) y de la Universidad Autónoma de Querétaro (UAQ) obtuvo resultados importantes en la 21a edición de la copa y congreso organizados por la Federación Internacional de Robot Soccer (FIRA Roboworld Cup) llevados a cabo en Beijing, China, que reúne anualmente a equipos de varias partes del mundo en diferentes competiciones.
El equipo, autonombrado LYNXBots, obtuvo el primer lugar de esta competición en las categorías de escalamiento en pared de robot humanoide HuroCup; el mejor artículo científico, presentado por el estudiante del Itcelaya, Michell Vargas Signoret; el reconocimiento a la mejor trayectoria académica estudiantil femenil del evento, a la alumna de la UAQ Ruth Alejandra Suárez Rivera, así como el cuarto lugar en la categoría de salto de longitud de robot y el nombramiento de miembro de la mesa directiva a la doctora Karla Anhel Camarillo Gómez.
Al respecto, el profesor investigador de la Facultad de Ingeniería de la UAQ, Gerardo Israel Pérez Soto, destacó que el equipo LYNXBots fue el único representante de México y que compitió con delegaciones de más de 24 países con robots humanoides, entre los que destacan el Tonatiuh 2.0 y Cuauhtémoc, que fueron adaptados a las competencias gracias al trabajo multidisciplinario entre estas dos instituciones.
El desarrollo de estos robots se ha ido generando en colaboración directa entre el Itcelaya con la Facultad de Ingeniería, tanto del campus universitario como el de San Juan del Río de la UAQ, y la empresa GKN Driveline de Celaya, que nos ha apoyado mucho, tanto para la creación de los robots como en los materiales. Esta competencia integra tanto la parte científica como la de desarrollo y práctica tecnológica, con la que buscamos que se involucren los muchachos”, aseguró.
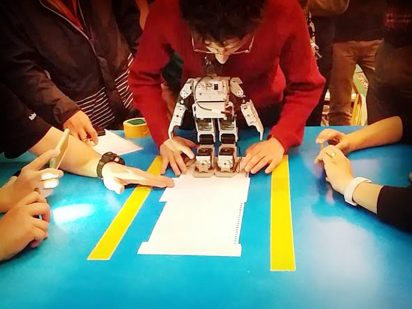
En lo que se refiere a Tonatiuh 2.0, la estudiante de la UAQ Ruth Alejandra Suárez Rivera detalló que este robot humanoide fue modificado en una primera instancia por los alumnos de Itcelaya para que fuera capaz de subir escalones, que era el requisito primordial en la competencia de escalamiento en pared (wall climbing) donde obtuvo el primer lugar.
El robot debía ser capaz de subir una escalera hasta el punto que nos indicaran los jueces, pero uno de los retos era que los jueces le quitaban o ponían peldaños, por lo que el robot debía calcular por sí mismo la distancia entre ellos para seguir avanzando. Se le hicieron varias modificaciones, sobre todo en el área de visión y piezas elaboradas en impresión 3D para hacerlo más funcional”, puntualizó.